Application of Lixel X1 SLAM Scanner in Volume Measurement
CLICK HERE TO DOWNLOAD THIS CASE STUDY
Project Background
Volume measurement is an important means for industries such as engineering construction, mining management, and agricultural production to formulate production plans, inventory materials, inventory mineral reserves, and grasp agricultural output.
Due to the different slope changes of the pile surface, the single-point measurement often cannot reflect the most real shape of the pile, and the data accuracy has a large error and is not suitable for the management of the pile with a large area, which is time-consuming and labor-intensive.
Point cloud models with irregular three-dimensional structures such as mine heaps, grain heaps, foundation pits, and ship silos are obtained by scanning with a hand-held laser scanner. Easily calculate volume, area, or capacity.
Lixel X1 has been widely used in pile measurement scenarios in industries such as engineering, mining, and agriculture due to its convenient collection method, efficient data processing, and high precision.
Traditional Measurement Methods
The traditional method is to use total station or GPS and RTK to measure the coordinates of discrete points on the surface of deposits, and then calculate the volume of ore piles.
Due to the complex surface shape of these deposits, the measured points are limited, and some elevations cannot be observed. In actual situations, the pile volume can only be calculated through contour line simulation;
In terms of photogrammetry solution, it is difficult to match point pairs of some piles, resulting in poor dense image matching accuracy and significant measurement errors.
Disadvantages of Traditional Measurement Methods
1.Low efficiency: traditional solution adopt single point measurement method, which requires total station to record single point data, and only one single point data can be recorded at a time
2.Labor & personnel professionalism: 1 total station operator, 2 mirror pole shifters and 1 recorder are required as well as high professional measurement skills required.
3.Poor accuracy: it can only collect single point data, often facing the problem of incomplete data collection, resulting in low precision of volume calculation.

Lixel X1 Mobile Laser Scanning Solution
Lixel X1 adopts SLAM technology (i.e. real-time positioning and mapping technology, hardware and software integration scheme, multi-sensor microsecond clock synchronization, and real-time reconstruction algorithm. In various unknown environments, it can easily and conveniently collect accurate and true color point cloud data without GNSS signal.
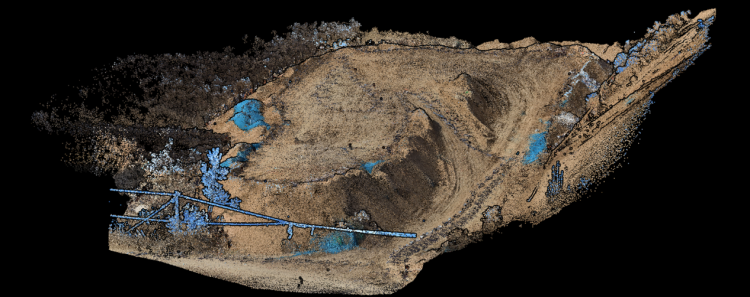
After scanning the pile area, we can obtain point cloud data reflecting the real structure of the pile.
By relying on LixelStudio post-processing software, the 3D model of the pile can be accurately fitted according to the point cloud, or the point cloud data can be directly used to achieve rapid volume calculation of the point cloud.
The advantage of Lixel X1 solution
1.Real-time solving: The real-time data decoding allows exporting the available data immediately after scanning. In LixelGO mobile software, you can monitor the point cloud effect in real time to ensure the data quality, providing an immersive scanning experience.
2.High efficiency : 90 minutes of ultra-long continuous operation time and high capability in resuming the scanning from the breakpoint. Large scenes do not require segmented operations, Point cloud data can be obtained continuously at once, saving time for post-processing data registration
3.Rich information collection: High-precision vision and laser fusion technology generate true color point clouds in real-time to twin the real world. Especially for the measurement of some detailed textures and irregular structures, color point clouds can provides intuitive references for 3D modeling, structure vectorization, and structural attribute recognition, which greatly reduce the workload of subsequent modeling and improve work efficiency.
From problems to Solutions
Compared to traditional measurement methods, using mobile 3D laser scanning technology to obtain point cloud data in a more efficient way and requires fewer operators.
Taking a scanning area of 1000 square meters as an example:
– On-site scanning: 1 person for Onsite data collection, real-time reconstruction, 10 minutes.
– Off-site data processing: 1 person for data post-processing.
Workflow
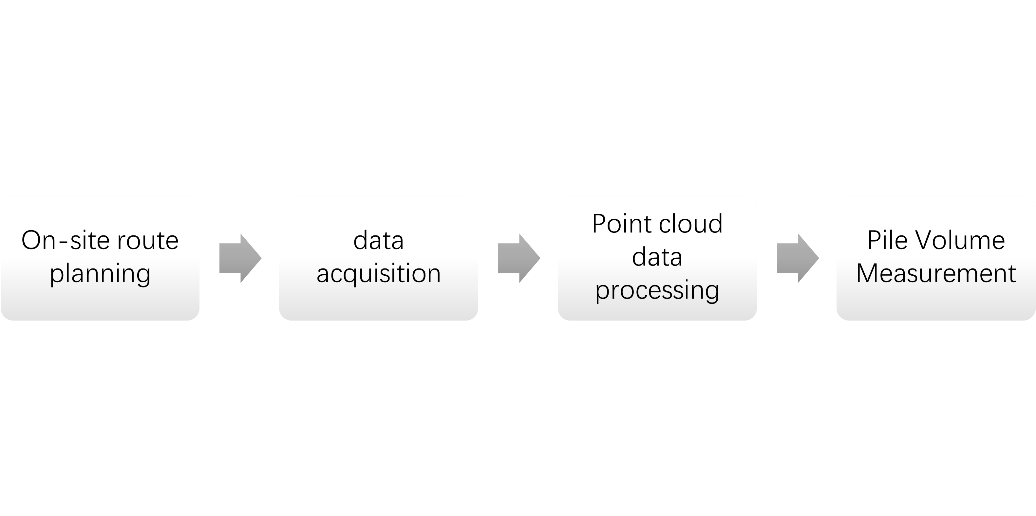
Planning route:
By conducting on-site surveys of the pile area, we plan to adopts a serpentine trajectory, with an interval of no more than 20 meters between the paths, so as to ensure the point cloud density and quality. At the same time, we make the starting and ending points of the scanning route overlap. When point cloud layering occurs, operators can correct and optimize it during post-processing.
Data capture:
The operator holds the Lixel X1 in handheld way to scan the pile area according to the planned route. During the operation, there is no need to change stations or post process alignment correction, resulting in smooth onsite scanning. The operator also collect some control points in a stop and go way to realize georeferencing.
At the same time, operators can also view the acquisition path, relative position, laser point cloud effect, control points list, as well as the situation of incorrect or missed scanning in real-time through Lixel GO APP. The onsite scanning takes 15 minutes.

Data processing
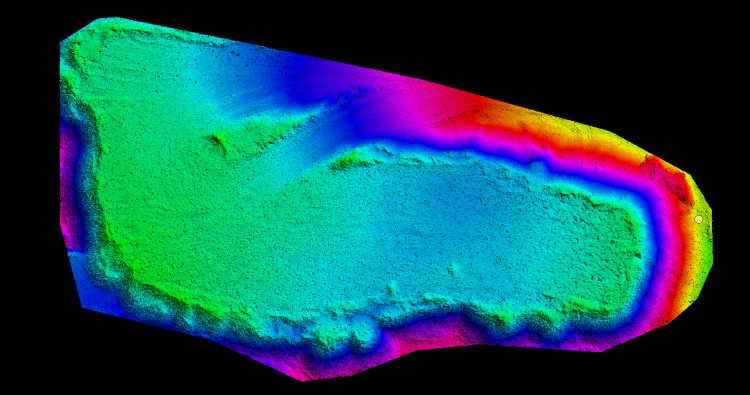
By using LixelStudio 3D post-processing software to generate true color point cloud models and DEM models, facilitating subsequent calculation of pile volume.
The color point cloud data :
We use our ground filter function to classify the ground points and automatically generate the DEM model. DEM model shows as below:
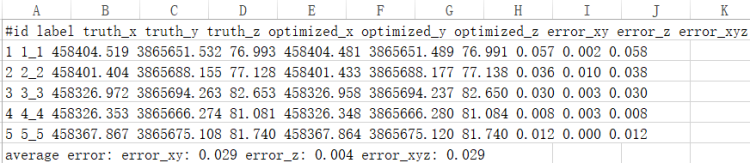
Data verification:
The result point cloud data was verified with the coordinates of five checking points on site, and the mean square error of plane accuracy was 0.029 meters, and the mean square error of elevation accuracy was 0.004 meters. The overall accuracy error is within 3 centimeters, which meets the accuracy requirements of pile measurement.
Conclusion
The Lixel X1 mobile laser scanner can quickly obtain the full structure of the pile through multi-source data fusion SLAM. The point cloud data can be directly exported for processing after scanning is completed. Combing with Lixelstudio Software solution, users can generate 3D model data automatically and the length, width, size, and volume of the pile can be measured more intuitively and conveniently, increasing the operation efficiency more than 10 times of traditional methods.
Lixel X1 solution can conduct measurement and inventory anytime and anywhere, saving onsite time and significantly improving data processing efficiency and result accuracy, greatly reducing the economic and time costs of a single operation. The integrated design of the Lixel scanner is easy to grip with one hand which is physical-friendly. And its versatile ways including backpack, vehicle, drone facilitate Lixel X1 scanner with more different scenarios and application.

